yogabook / movement physiology / walking

Walking is a cyclical movement on two legs for locomotion in which at least one foot is always in contact with the ground. By omitting this requirement, walking can become jogging, running and sprinting if locomotion is further accelerated. Walking is found in different contexts as everyday locomotion on two legs, i.e. leisurely strolling, as more ambitious walking, as the sport of walking and as hiking. More ambitious walking can certainly promote basic endurance and already offers a significant preventive effect against some important diseases such as heart attacks, diabetes and strokes, which are a typical consequence of today’s civilised lifestyle.
In simplified terms, walking consists of placing one foot – laterally offset – in front of the other. Biomechanically, this is far more complex than it first appears. However, the basic components of this process are that at the beginning of the free leg phase, in which one foot lifts off the ground, the hip flexors pull one thigh forwards, whereby the knee joint first undergoes a passive, gravity-induced flexion, only to be stretched a little by the force of the quadriceps so that the desired stride length is achieved when the foot is placed back on the ground, usually in slight plantar flexion or, more often, in dorsiflexion. This is followed by a rolling movement in the direction of plantar flexion, in which the triceps surae can contribute to propulsion. Once the foot has touched down, the hip extensors – and in this case the hamstrings in particular with moderate propulsion – begin to push the pelvis forwards with hip extension in relation to the standing foot. At a certain point, the rear foot, at the end of its rolling phase as standing foot, lifts off and must be dorsiflexed so that the toes of this foot do not touch the ground in the free legg phase and the later transition to the next supporting leg phase.
This results in a cyclical movement that is essentially driven in a flexible relationship by the hamstrings and the triceps surae. The ventral muscles of the lower limb are not important for the actual propulsion, that of the lower leg even less than the quadriceps in the ventral thigh. The dorsiflexors of the lower leg only have a restoring function so that renewed plantar flexion can promote propulsion and must also prevent the toes from touching the ground. The quadriceps, which mainly provides the ventral thigh, is involved as an extensor of the knee joint in order to achieve the desired stride length in the free leg phase, but hardly supports the extension of the knee joint at the end of the standing leg phase.
Walking is a continuous forward movement of the centre of gravity, although it is not completely uniform: the centre of gravity does not move forwards completely uniformly in the ventral direction, however the center of gravity oscillates much more in the cranial direction. The extent of both oscillations depends heavily on the individual walking style or gait. The exploration walking provides an opportunity to explore the most important variable parameters.
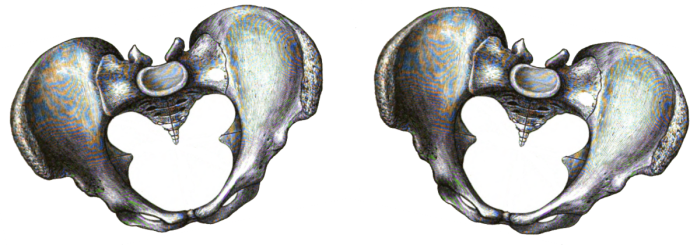
The late standing leg phase, in which one leg pushes the pelvis forwards, causes a shift of the contralateral side backwards due to the inertia of the supported partial body weight, which is further intensified by the fact that the contralateral hip flexors accelerate the free leg forwards, which also pulls the pelvis backwards due to the inertia. This results in an oscillation of the pelvis around the vertical axis (cranial-caudal), exaggerated in the image:
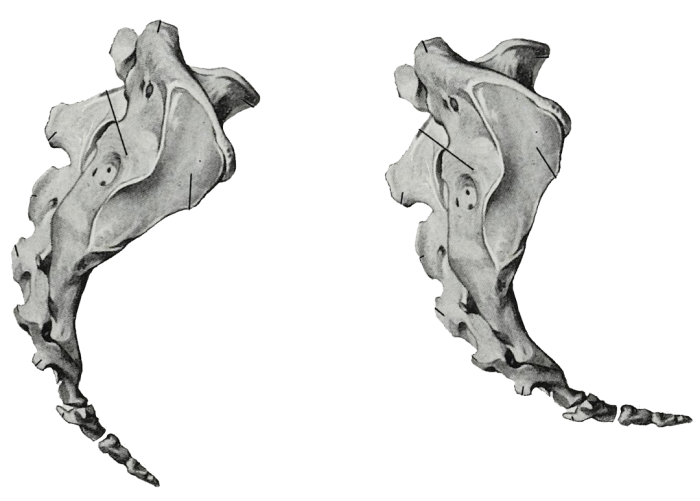
Both the hip extension of the standing leg and the hip flexion of the free leg exert a torque in the direction of the transverse axis of the pelvis (left-right), which leads to an oscillation of the pelvis around this transverse axis, shown exaggerated in the image:
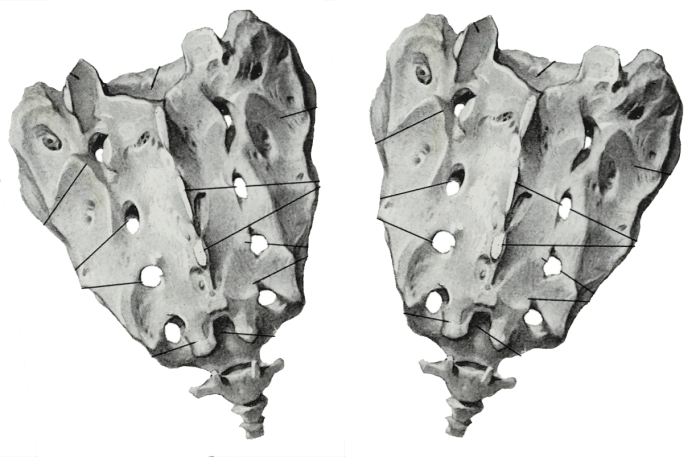
In addition to these two oscillations, there is another oscillation around the longitudinal axis of the pelvis (frontal-dorsal) due to the gravitational effect of the supported partial body weight on the side of the free leg, which lowers the pelvis, and the knee extension of the standing leg, which raises the pelvis on the side of the standing leg, shown exaggeratedly in the image:
This requires the muscles of the upper body to stabilise the position of the pelvis, which will be more pronounced the faster and more impulsive the movement is.
In order to keep the oscillations of the pelvis as low as possible, which improves propulsion and reduces possible side effects such as increased wear in the joints, it is not only the muscles of the upper body that must stabilise the pelvis. For this purpose, there is also a simultaneous, counter-movement of the arms, which very clearly promotes the stability of the upper body. The more the legs move, the more pronounced this movement must be.
Since the mass of the legs is in the order of 3 times as great as that of the arms, and the legs represent larger lever arms due to their greater length, the mass compensation by the arms is necessarily not complete, but it plays an essential role, as the attempt to omit it easily shows. The mass of the arms is included linearly in the compensation, but the working range in which the arms move counts quadratic, because the acceleration must be greater for a larger working range. For these reasons, the mass and, above all, the efficiency of the frontal abductors and the retroverters of the shoulder joint play a major role for sprinters, which is clearly visible in their physique, especially in comparison to long-distance runners.
See also the explainations at biomechanics of the knee joint.