yogabook / movement physiology / types of joints
Depending on its geometric shape, a joint has one or more physiological dimensions of movement that can be described by axes of rotation. The known shapes of the joints are labelled with the movement dimensions.
Ball joint . Egg joint . Hinge joint . Wheel joint . Saddle joint . Plane joint
Contents
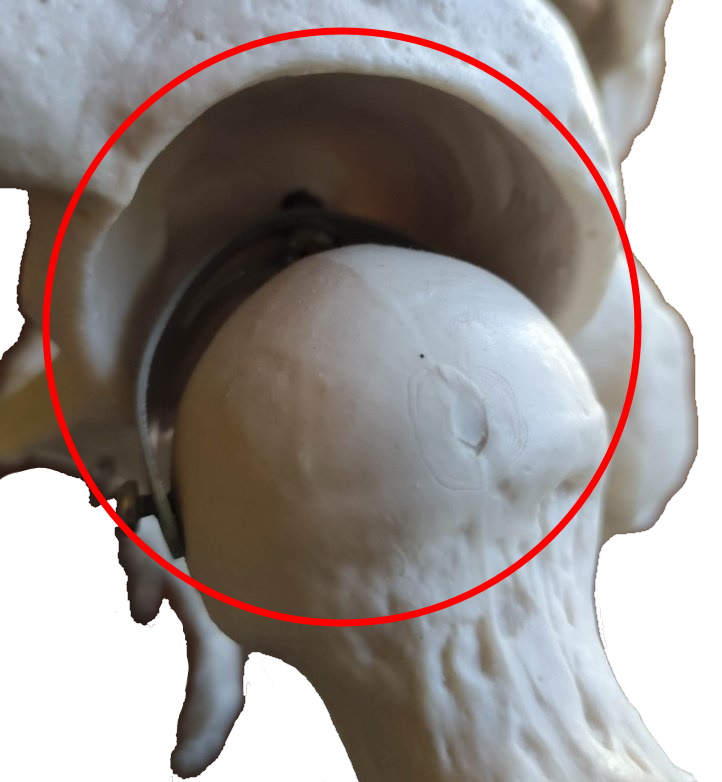
Ball-and-socket joint / Articulatio sphaeroidea
Dimensions of movement: 3.
A spherical section engages with the congruent concave counterpart. Two-dimensional tilting and axial rotation are possible. One example is the shoulder joint. The hip joint with a further circumference is a special case of a ball joint and is referred to as a nut joint (enarthrosis).
Egg yolk joint / Ellipsoid Joint / Articulatio ellipsoidea
Dimensions of movement: 2.
An ellipsoid section engages with the congruent concave counterpart. Two-dimensional tilting is possible, but no axial rotation. An important example is the radiocarpal joint.

Hinge joint / Hinge joint
Dimensions of movement: 1.
A cylinder section engages with its congruent concave counterpart: Only rotation around the longitudinal axis of the cylinder is possible. An important example is the humeroulnar joint, i.e. the part of the elbow joint in which the ulna moves around the distal humerus.
Rotary joint
Dimensions of movement: 1.
A cylinder engages in a congruent hollow cylindrical surface: Only rotation around the longitudinal axis of the cylinder is possible. An important example of a rotary joint is the distal radioulnar joint, while the proximal radioulnar joint is a trochiod (pivot) joint. The joint between the atlas and axis is also a rotary joint.
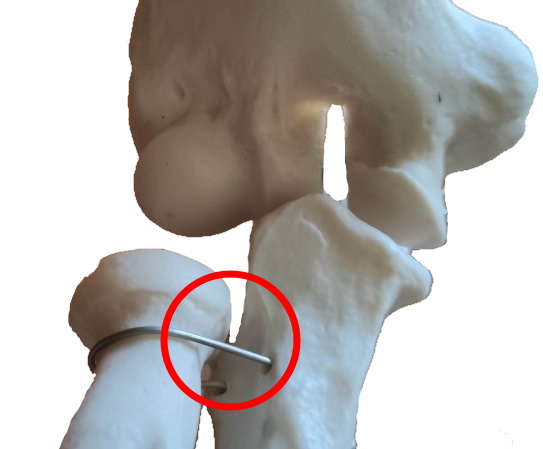
Saddle joint / Articulatio sellaris
Dimensions of movement: 2.
A saddle engages with another saddle that is rotated 90° to it: Two-dimensional tilting is possible, but no rotation. An important example is the carpometacarpal joint of the thumb (carpometacarpalis pollicis). The carpometacarpal joints are also saddle joints.

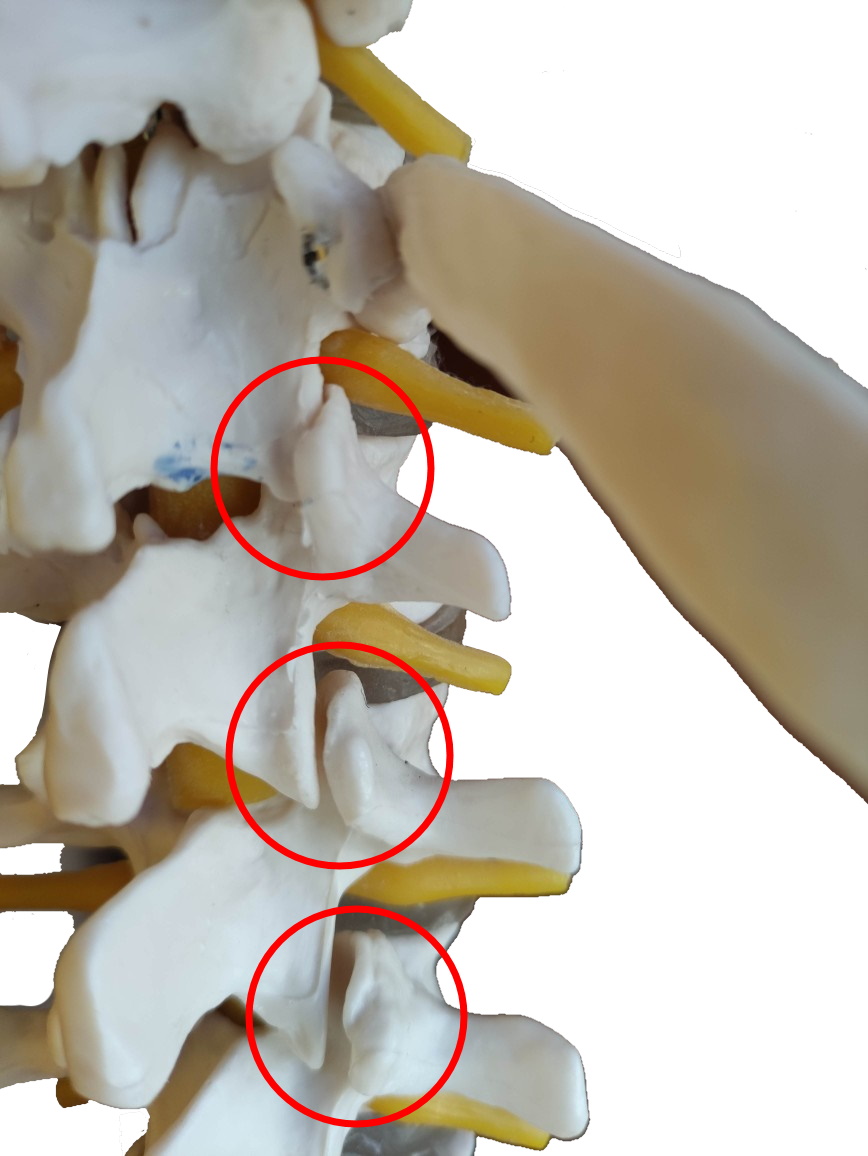
Plane joint
Dimensions of movement: 1.
A flat surface rests on a flat counterpart: only axial rotation is possible. The facet joints of the spine are an important example.
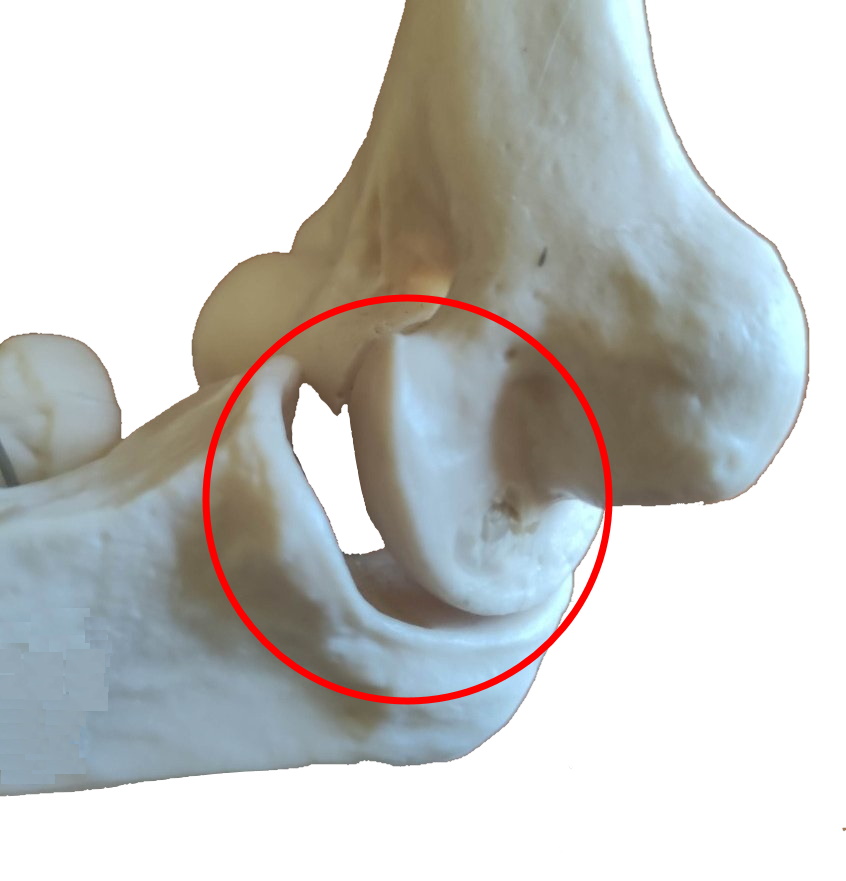
Condylar joint / articulatio bicondylaris
Dimensions of movement: 2 – 3
The condyles of the joint partners are at an angle to each other and allow rotation around an axis through the condyles of one of the two partners (flexion / extension) as well as axial rotation (internal rotation / external rotation). An important example is, of course, the knee joint which, without the strong ligaments would have a third dimension of movement: lateral translation.
The movements of the joint surfaces are rolling or sliding. Sliding can take place on both a flat and a curved surface. In the case of the hip joint, for example, all movements consist of sliding movements. Congruence of the joint surfaces means that the radii of curvature correspond. However, many joints are physiologically not 100% congruent, as a minimally smaller radius of the ball, condylus or cylinder not only increases flxibility, but also improves lubrication. Rolling and sliding are not mutually exclusive, the best example of this is the knee joint, which performs a predominantly rolling movement, but from a flexion angle of around 90° predominantly a sliding movement. Furthermore, the final rotation is a pure sliding movement.